Votre liste des produits est actuellement vide !
Votre demande est notre moteur
Votre demande est notre moteur

Malgré notre wiki complet, vous n’avez pas trouvé l’information recherchée ? Alors n’hésitez pas à nous contacter directement.
Notre équipe se fera un plaisir de vous aider personnellement, qu’il s’agisse d’applications spécifiques, de fabrications spéciales ou de contenus manquants. Ensemble, nous trouverons la solution adaptée.
Auteur:
Dernière modification:
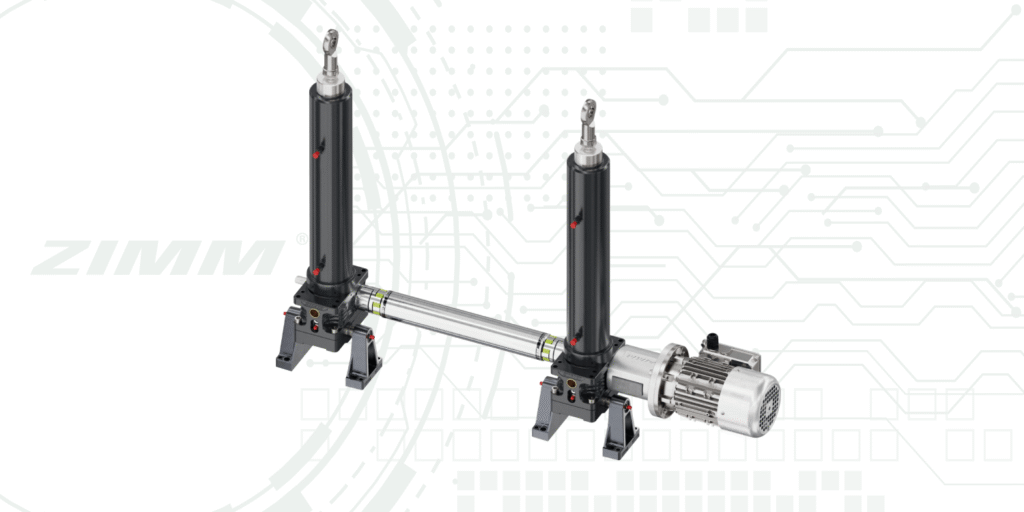
L’intégration d’un actionneur électromécanique dans un système de commande numérique s’effectue via des interfaces et des protocoles de communication standardisés tels que CANopen ou EtherCAT. Ces protocoles permettent une communication transparente avec la solution de motorisation pour garantir un mouvement linéaire précis et répondre aux tâches de positionnement et d’ajustement.


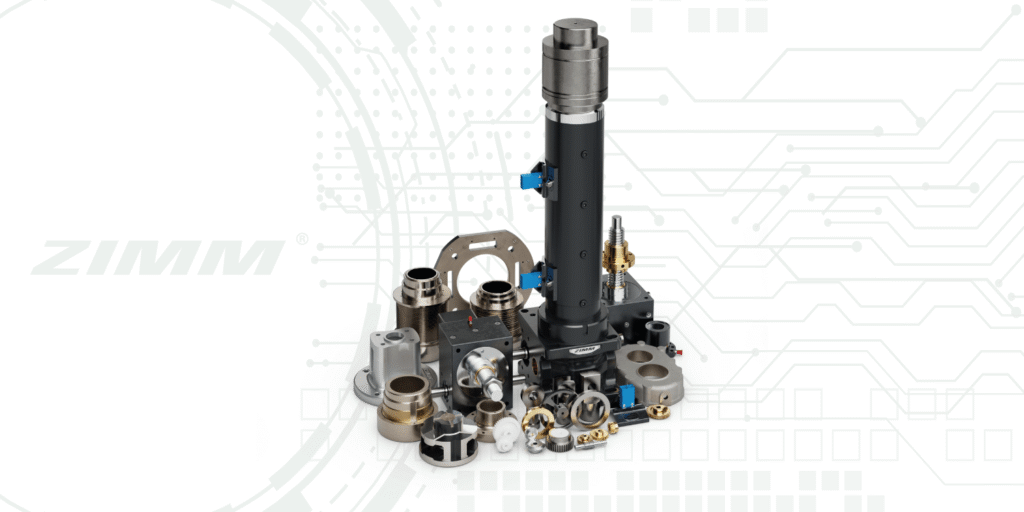
Notre expertise inclut le développement et la fabrication de vérins à vis industriels avec leurs accessoires, ainsi que la fonderie, la production en série et l’usinage de précision. Nous offrons non seulement des vérins robustes, mais aussi des éléments d’entraînement sur mesure, entièrement conçus selon vos plans et spécifications.
En tant que leader européen de la fabrication de vérins à vis, nous nous appuyons sur des machines de pointe et des installations de mesure et de test avancées. Nous fabriquons ainsi presque tous nos produits et garantissons une qualité optimale en continu.
Quel que soit le type d’application ou le domaine d’activité, nos solutions sont parfaitement adaptées à vos besoins. Faites votre demande dès aujourd’hui et améliorez vos processus de production grâce à nos solutions modulables et personnalisables.
Veuillez contacter notre représentant à l’aide du formulaire. Nous vous répondrons dans les plus brefs délais.

Vous devez charger le contenu de reCAPTCHA pour soumettre le formulaire. Veuillez noter que ce faisant, des données seront partagées avec des providers tiers.
Plus d'informations